About the VIPRO Remote Control platform
VIPRO (Versatile, Intelligent, and Portable Platform for Emergency Robots) is a research project funded by UEFISCDI Institution in Romania by Partnerships in priority areas program within the National Plan for Research, Development and Innovation 2007-June 30, 2014.
The main objective of the project is the development experimental research for the development of an experimental model of the VIPRO platform through a virtual projection original method, known as Vladareanu Munteanu method, which involves:
- representing modern mobile robots in 3D virtual environment through a powerful robotic simulator in order to achieve and improve the performance of urban search and rescue robots
- modeling of a last generation NAO robot mechanical structure as well as for the rescue robot RABOT, developed under a European FP7 project where IMSAT is a main partner
- building a system with an open architecture and adaptive networks as an alternative for classic robot control systems
- developing intelligent control interfaces that use advanced control strategies tailored to the robot type, like extenics control, neutrosophic control, adaptive mechatronic human, etc., implemented by ICT techniques with fast processing and real-time communications
- developing the VIPRO platform with e-learning features which will enable the inter-academic networks for research and development of new intelligent NAO or RABOT robots.
The main activities of the project are:
- design of the experimental model of a versatile, intelligent, portable VIPRO platform
- designing, testing, defining experimentation methods of intelligent control
- improve the performance of robots with artificial intelligence
- remote controlled adaptive robot networks, with demonstration on NAO robots, used in search and rescue operations on the RABOT type.
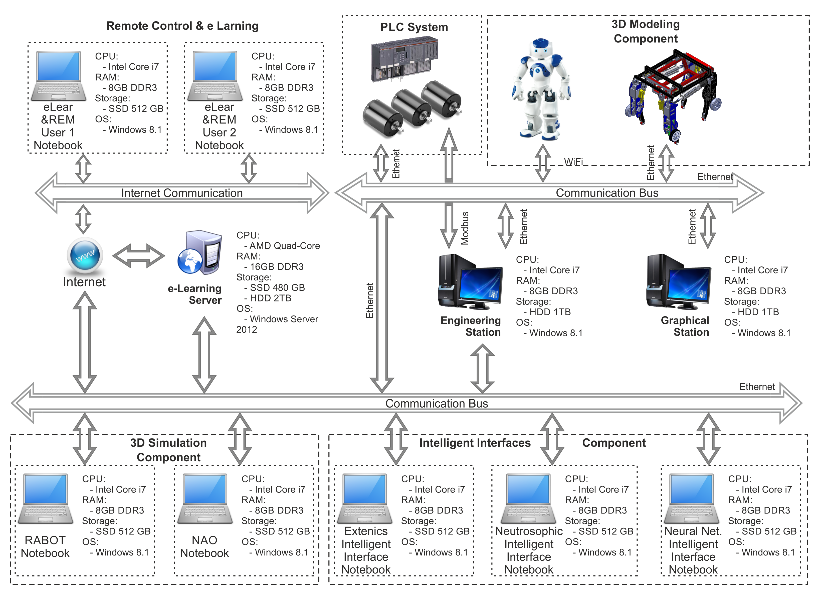
This web application represents the Remote Control component of the VIPRO project. It allows the user to access through a Remote Desktop Connection the available software resources. More details on how to access these resources are provided on the Platform page.



 VIPRO is funded under the Executive Agency for Higher Education, Research, Development and Innovation Funding's (UEFISCDI) : PN-II-PT-PCCA-2013-4-2009, Grant agreement nº 009/2014
VIPRO is funded under the Executive Agency for Higher Education, Research, Development and Innovation Funding's (UEFISCDI) : PN-II-PT-PCCA-2013-4-2009, Grant agreement nº 009/2014